|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fiche sur
la COMPOSITION DE TRANSFORMATION. |
|
||
|
|
|
|
|
|
|
Fiche 1 : Image de figures usuelles par des
transformations. |
|
|
|
|
Fiche 2 : Rotation. |
|
|
|
|
Fiche 3 : Composition de deux symétries
centrales. |
|
|
|
|
Fiche 4 : Composition de deux symétries
orthogonales d’axes parallèles. |
||
|
|
Fiche 5 : Composition de deux symétries
orthogonales d’axes perpendiculaires. |
||
|
|
Fiche 6 : Composition de
translation.( et somme de vecteurs) |
|
|
|
|
|
|
|
|
Pré requis: |
|||
ENVIRONNEMENT du
dossier:
|
Objectif précédent 2°)
voir le cours résumé sur les transformations
géométriques. |
Objectif suivant |
|
|
|
Rappels : |
|
||
|
|
LES TRANSFORMATIONS GEOMETRIQUES (
COMPOSITION ) : |
|
||
|
|
|
|||
|
|
Liste des
transformations principales : |
|
||
|
|
|
|
||
|
|
1°) Les divers
« déplacements » : |
|
||
|
|
|
|
||
|
|
·
Rotation |
|||
|
|
2°) les
oppositions ou symétries, qui, en géométrie plane ,
sont des cas particuliers de déplacements. |
|
||
|
|
|
|
||
|
|
||||
|
|
3°) les divers
modes de projections |
|
||
|
|
|
|
||
|
|
||||
|
|
|
|
||
|
|
4 °) l’homothétie |
|
||
|
|
|
|
||
|
|
5°) la similitude |
|
||
|
TEST |
COURS |
Devoir Contrôle |
Devoir évaluation |
Interdisciplinarité |
|
Corrigé Contrôle |
Corrigé évaluation |
|
|
Fiches sur
la COMPOSITION DE TRANSFORMATIONS . Composition de translations et somme
vectorielle. ( de deux vecteurs) « Le vecteur – somme. » |
|
||
|
|
|
|
||
|
|
|
|
||
|
|
|
|
||
|
|
|
|
||
|
|
Fiche 6 : Composition de translation. |
|
|
|
|
|
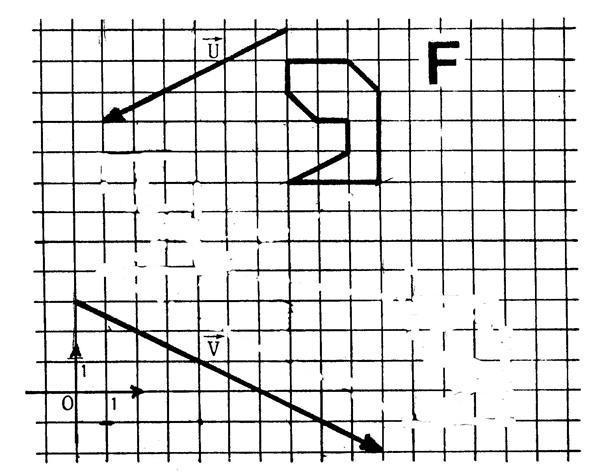
Ci-dessous : Dans le plan muni d’un repère,
on donne deux vecteurs -
|
|
||
|
|
On vous demande de dessiner l’image « F’ » de la figure « F » dans la translation de vecteur |
|
||
|
|
|
|
||
|
|
Observation : Il semble que « F’’ » soit l’image de « F’ » par une ……………………... Dessinez près de « F » et « F’’ » un représentant du vecteur de cette
translation. |
|
||
|
|
|
|||
|
|
|
|
||
|
|
Appelons « |
|
||
|
|
|
|
||
|
|
Lisez ( sur le dessin)
ses coordonnées : vous
trouvez : « |
|
||
|
|
|
|
||
|
|
Lisez les coordonnées du vecteur |
|
||
|
|
Lisez les coordonnées du vecteur |
|
||
|
|
|
|
||
|
|
Vous remarquez que : ( pour « ( pour « |
Rappel calcul :
addition de deux nombres relatifs de signe contraire. |
|
|
|
|
|
|
||
|
|
Nous allons démontrer ce que vous venez de
constater : |
|
||
|
|
|
|
||
|
|
Ø Choisissons un point « M »
quelconque de « F » . Appelons ( Appelons « M ’ » l’image de « M » dans la
translation de vecteur « Grâce au théorème vu dans la fich vu …N°5,
translation de vecteur ;…. .. ;
on peut écrire « M ’ |
|
||
|
|
|
|
||
|
|
|
|
||
|
|
|
|
||
|
|
Appelons « M’’ » l’ image de
« M’ » dans la translation
de vecteur « Grâce au même théorème on peut écrire : « M’’ |
|
||
|
|
C'est-à-dire : « M’’ |
|
||
|
|
|
|
||
|
|
Calculons les coordonnées de « « « Quel que soit le point « M » de
« F » et son image « M
’’ » de « F ‘’ » , « |
|
||
|
|
Ces coordonnées sont celles de |
|
||
|
|
|
|
||
|
|
On passe donc de « F » à
« F’’ » par ………………….. de
vecteur |
|
||
|
|
Enoncez , verbalement , la relation qui
existe entre les coordonnées de « |
|
||
|
|
|
|
||
|
|
Ø Il en est toujours ainsi
quelque soient les vecteurs « |
|
||
|
|
Théorème : La composée d’une translation de vecteur «
|
|
||
|
|
|
|
||
|
|
Définition : Le vecteur « |
|
||
|
|
|
|
||
|
|
|
|
||
|
|
|
|
||
|
|
|
|
||